
china@zuiwenxue.com
0534-2796998/2787998/2783998/2763998




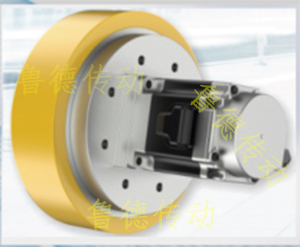
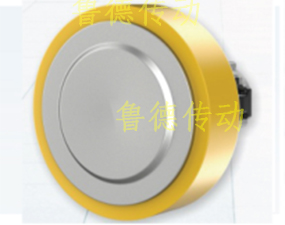
AGV 行走輪舵輪有 以下部件組成:
1.車體(tǐ):由車架和相應的機械裝置所組成,是AGV行走輪舵(duò)輪基礎部分,也是(shì)其他總成(chéng)部(bù)件的安裝基礎。
2.蓄電和充電裝置:由充電站(zhàn)及自動充電機組成,AGV行走(zǒu)輪可以完成自動在(zài)線充電(diàn),由(yóu)中央控製係統集中管理,實現24小時連續生產。
3.驅動裝置:由車輪、減(jiǎn)速器、製動器、驅動電機及速度控製器(qì)等部分組成,是控(kòng)製AGV行走輪(lún)舵輪(lún)正常運行的裝置。其運行指令由計算機或人工控製發出,運行速度、方向、製動的調節由計算機控製,為了安全,在斷電時製動裝置(zhì)則靠機械製動方式實現。
4.導向裝置:接受(shòu)導引係統的方向(xiàng)信息,確保AGV行走輪舵輪小車沿正確路徑行走。
5.通信裝置:實現AGV行(háng)走輪與控製台及監控設備之間的信息交換(huàn)。
6.安全與輔助裝置(zhì):為了避免AGV行走輪小車輪在係統出故障或有人員經過AGV行走輪的工作(zuò)路線時出現碰撞,AGV行走輪舵輪一般都帶有障礙物探測及避撞、警音、警視、緊急停止等(děng)裝置(zhì)。
7.移(yí)載裝(zhuāng)置:與所搬運貨物(wù)直接接觸,實現貨物轉載的裝置。不(bú)同的任務和場地環境下,可以選用不同的移(yí)載(zǎi)係統,常用的有滾道式、叉車式、機械手式等。
8.中(zhōng)央控製係統:由計算機、任務采集(jí)係統、報警係統及相關的軟件組(zǔ)成。主(zhǔ)要分為地麵(上位)控製係統(tǒng)及車載(zǎi)(下位(wèi))控製(zhì)係統,其(qí)中,地麵控製係統指AGV行走輪係統的固定設備,主要負責任務分配,車輛(liàng)調度,路徑(jìng)(線)管理,交通管理,自動充電等功能;車載控製係統(tǒng)在收到上位(wèi)係統的指令後,負責AGV行走輪小車的導航計算,導引實現,車輛行走,裝卸操作等功能。
AGV行走輪的相關技術以17C傳動出的技術參數為準。

升降機(jī)-JWM係列蝸輪絲杆升(shēng)降機")
,NMRV渦輪減速器,微型(xíng)減速器-NRV無(wú)間隙減速機")


列減速機,R減速機,斜齒輪減速機-R係列硬齒麵減速機")
")
動推杆(gǎn)-電動推杆")
降機,絲杠升降機,升降機-絲(sī)杆升降機")
形絲杆升降機,錐齒輪滾珠絲杆升(shēng)降機-傘齒輪絲杆(gǎn)升(shēng)降機")
德錐齒輪轉向箱,轉向箱,螺(luó)旋(xuán)錐齒輪換(huàn)向器-傘齒輪轉向(xiàng)箱")
機推杆,蝸輪蝸(wō)杆電動推杆,螺旋絲杠電動推杆(gǎn)-升(shēng)降機推(tuī)杆")
